De Wikipedia, la enciclopedia libre

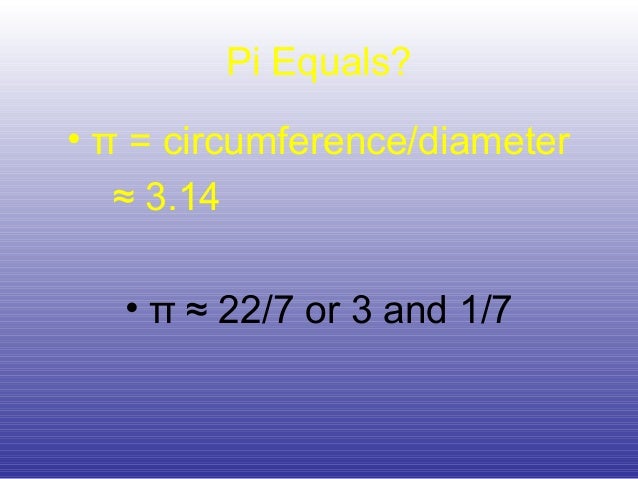
Campo magnético que rota como suma de vectores magnéticos a partir de 3 bobinas de la fase.

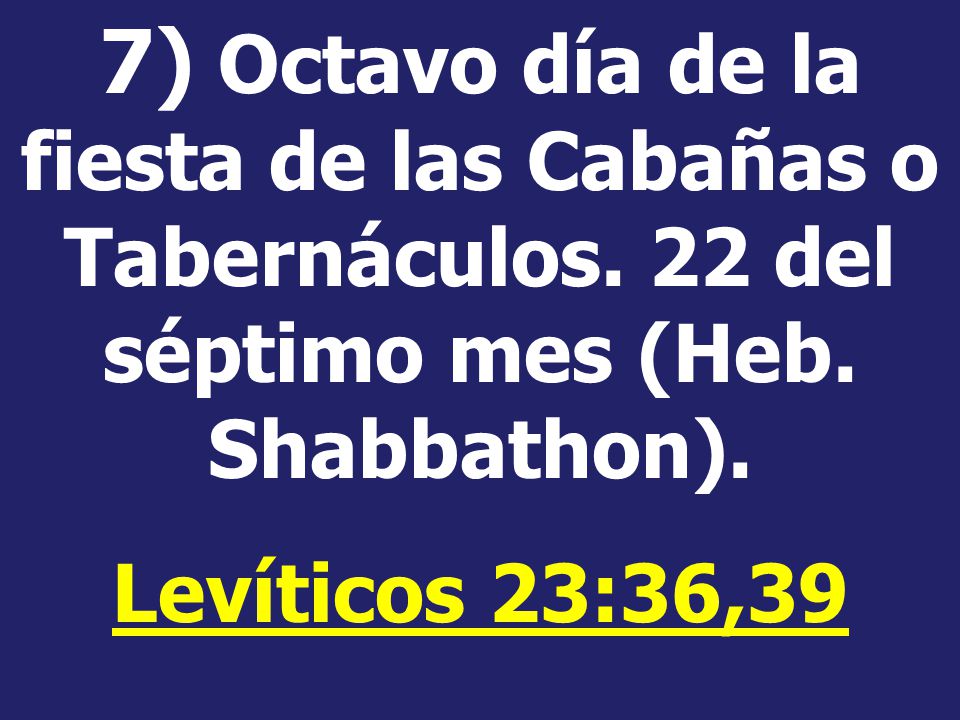
Rotor, estátor y ventilador de un motor eléctrico.
El motor eléctrico es un dispositivo que transforma la energía eléctrica en energía mecánica por medio de la acción de los campos magnéticos generados en sus bobinas. Son máquinas eléctricas rotatorias compuestas por un estátor y un rotor.
Algunos de los motores eléctricos son reversibles, ya que pueden transformar energía mecánica en energía eléctrica funcionando como generadores o dinamo. Los motores eléctricos de tracción usados en locomotoras o en automóviles híbridos realizan a menudo ambas tareas, si se los equipa adecuadamente o con frenos regenerativos.
Son utilizados en infinidad de sectores; instalaciones industriales, comerciales, particulares; como ventiladores, teléfonos, bombas, máquinas herramientas, aparatos electrodomésticos, herramientas eléctricas y unidades de disco. Los motores eléctricos pueden ser impulsados por fuentes de corriente continua (DC), tal como baterías de automóviles y por fuentes de corriente alterna (AC) bien sea directamente de la red eléctrica bifasica o trifasica. Los pequeños motores se pueden encontrar hasta en relojes eléctricos. Los motores de uso general con dimensiones y características más estandarizadas proporcionan la potencia adecuada al uso industrial. Los motores eléctricos más grandes se usan para propulsión de trenes, compresores y aplicaciones de bombeo con potencias que alcanzan 100 megavatios. Estos motores pueden ser clasificados por el tipo de fuente de energía eléctrica, construcción interna, aplicación, tipo de salida de movimiento, etcétera.
Werner von Siemens patentó en 1866 la dinamo. Con ello no sólo contribuyó al inicio de los motores eléctricos, sino también introdujo el concepto de Ingeniería Eléctrica, creando planes de formación profesional para los técnicos de su empresa. La construcción de las primeras máquinas eléctricas fue lograda en parte, en base a experiencia práctica. A mediados de la década de 1880, gracias a la teoría desarrollada por James Clerk Maxwell y al éxito de Werner von Siemens, la ingeniería eléctrica se introdujo como disciplina en las universidades.
La fascinación por la electricidad aumentó con la invención de la dinamo. Karl Marx predijo que la electricidad causaría una revolución de mayores alcances que la que se vivía en la época con las máquinas de vapor. Antonio Pacinotti inventó el inducido en forma de anillo en una máquina que transformaba movimiento mecánico en corriente eléctrica continua con una pulsación, y dijo que su máquina podría funcionar de forma inversa, esta es la idea del motor eléctrico de corriente continua.
Los primeros motores eléctricos técnicamente utilizables fueron creados por el ingeniero Moritz von Jacobi, quien los presentó por primera vez al mundo en 1834.
Principio de funcionamiento[editar]
Los motores eléctricos son dispositivos que transforman energía eléctrica en energía mecánica. El medio de esta transformación de energía en los motores eléctricos es el campo magnético. Existen diferentes tipos de motores eléctricos y cada tipo tiene distintos componentes cuya estructura determina la interacción de los flujos eléctricos y magnéticos que originan la fuerza o par de torsión del motor.
El principio fundamental que describe cómo es que se origina una fuerza por la interacción de en una carga eléctrica puntual q en campos eléctricos y magnéticos es la Ley de Lorentz:[1]
donde:
- q-carga eléctrica puntual
 -Campo eléctrico
-Campo eléctrico
 -velocidad de la partícula
-velocidad de la partícula
 -densidad de campo magnético
-densidad de campo magnético
En el caso de un campo puramente eléctrico la expresión de la ecuación se reduce a:

La fuerza en este caso está determinada solamente por la carga q y por el campo eléctrico . Es la fuerza de Coulomb que actúa a lo largo del conductor originando el flujo eléctrico, por ejemplo en las bobinas del estátor de las máquinas de inducción o en el rotor de los motores de corriente continua.
En el caso de un campo puramente magnético:

La fuerza esta determinada por la carga, la densidad del campo magnético y la velocidad de la carga . Esta fuerza es perpendicular al campo magnético y a la dirección de la velocidad de la carga. Normalmente hay muchísimas cargas en movimiento por lo que conviene reescribir la expresión en términos de densidad de carga  y se obtiene entonces densidad de fuerza
y se obtiene entonces densidad de fuerza  (fuerza por unidad de volumen):
(fuerza por unidad de volumen):

Al producto  se le conoce como densidad de corriente
se le conoce como densidad de corriente  (amperes por metro cuadrado):
(amperes por metro cuadrado):

Entonces la expresión resultante describe la fuerza producida por la interacción de corriente con campo magnético:

Este es un principio básico que explica cómo se origina las fuerzas en sistemas electromecánicos como los motores eléctricos. Sin embargo, la completa descripción para cada tipo de motor eléctrico depende de sus componentes y su construcción.
- A igual potencia, su tamaño y peso son más reducidos.
- Se pueden construir de cualquier tamaño y forma, siempre que el voltaje lo permita.
- Tiene un par de giro elevado y, según el tipo de motor, prácticamente constante.
- Su rendimiento es muy elevado (típicamente en torno al 75%, aumentando a medida que se incrementa la potencia de la máquina).
- Este tipo de motores no emite contaminantes, aunque en la generación de energía eléctrica de la mayoría de las redes de suministro sí emiten contaminantes.
- No necesita de refrigeración ni ventilación forzada, están autoventilados.
- No necesita de transmisión/marchas.
Motores de corriente continua[editar]

Diversos motores eléctricos.
Los motores de corriente continua se clasifican según la forma como estén conectados, en:
Además de los anteriores, existen otros tipos que son utilizados en electrónica:
Motores de corriente alterna[editar]
Existen 4 tipos, siendo el primero y el último los más utilizados:
Los motores eléctricos se utilizan en la gran mayoría de las máquinas modernas. Su reducido tamaño permite introducir motores potentes en máquinas de pequeño tamaño, por ejemplo taladros o batidoras. Su elevado par motor y alta eficiencia lo convierte en el motor ideal para la tracción de transportes pesados como trenes; así como la propulsión de barcos, submarinos y dúmperes de minería, a través del sistema Diésel-eléctrico.
Cambio de sentido de giro[editar]
Para efectuar el cambio de sentido de giro de los motores eléctricos de corriente alterna se siguen unos simples pasos tales como:
- Para motores monofásicos únicamente es necesario invertir las terminales del devanado de arranque, esto se puede realizar manualmente o con relés conmutadores
- Para motores trifásicos únicamente es necesario invertir dos de las conexiones de alimentación correspondientes a dos fases de acuerdo a la secuencia de trifases.
- Para motores de a.c. es necesario invertir los contactos del par de arranque.
Regulación de velocidad[editar]
Síncronos trifásicos existen dos formas de poder variar la velocidad, una es variando la frecuencia mediante un equipo electrónico especial y la otra es variando la polaridad gracias al diseño del motor. Esto último es posible en los motores de devanado separado, o los motores de conexión Dahlander pero solo es posible tener un cambio de polaridad limitado ejem: 2 polos y 4.
Véase también[editar]
http://es.wikipedia.org/wiki/Motor_el%C3%A9ctrico 
.JPG)